
Recently, I sat down to talk with Daniel Naftalovich, who is a PhD candidate in robotics engineering & control systems at California Institute of Technology. Simultaneously, he is pursuing a medical degree from the University of Southern California (he claims he has time to sleep, but somehow I doubt it). As may be expected, he had a great deal to say about the use of unmanned systems for use in surgeries.
“The one thing I try to make people understand is that robot surgeons do not exist,” says Naftalovich.
This assertion may seem strange, because we hear a lot about the increasing role of unmanned systems in the healthcare field. Indeed, a Google search yields over a million results for “robot surgeon.”
What actually is happening is robotic-assisted surgery. In my discussion with Naftalovich I was surprised to learn that surgical robots have virtually no autonomy. “Robotic surgeons” are really computerized tools, which enable the human doctor to teleoperate. Unlike traditional surgery, in which the doctor stands on his feet, hovering over the patient, robotic assistance enables the surgeon to sit down a few feet away, often in the same room.

Build-Your-Own-Module (BYOM)
Tablet Modules
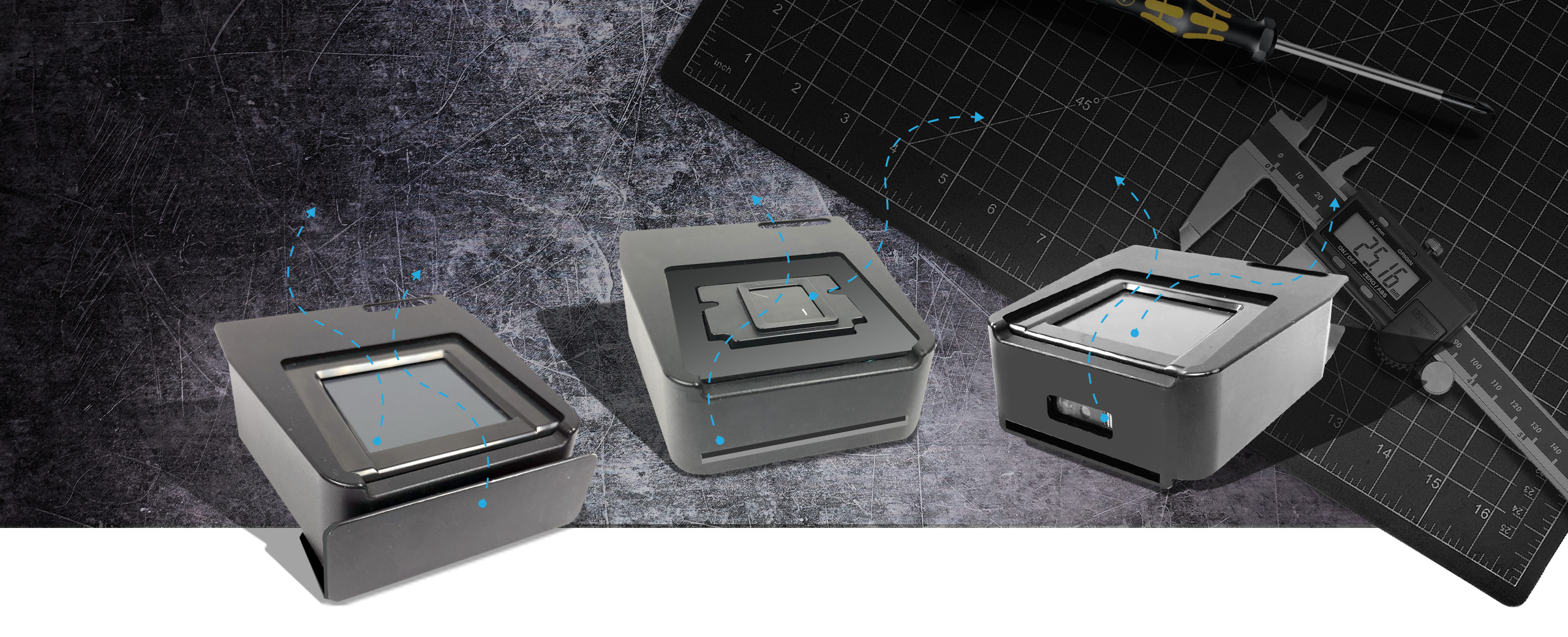
SINGLE FINGERPRINT SCANNER
DUAL FINGERPRINT SCANNER
DUAL FINGERPRINT SCANNER
SMART CARD READER
MAGNETIC STRIPE READER
2D BARCODE READER
Compatible models: BioSense & BIOPTIX Tablets
Build-Your-Own-Module (BYOM)
Smartphone Modules

DUAL FAP45 FINGERPRINT MODULE
SINGLE FAP45 FINGERPRINT MODULE
Compatible models: BioFlex® Smartphones
“Teleoperated surgery offers a number of advantages,” explains Naftalovich. “For one thing, a surgeon who is sitting has greater endurance during lengthy operations than one who is standing.” The physical toll on surgeons during long operations is a real problem; neck problems are a prominent career ender for many surgeons.
Teleoperation offers another advantage. More surgical tools can be placed above the patient, since the doctor is no longer above him. “A robot can have four arms, while a human has only two,” says Naftalovich. This allows a more rapid transition between tools during operations, and better tool management.
Often in Human-Robot Interactions (HRI), the human has to learn unnatural motions in order to use an unmanned system to execute an action. For example, to get an effector arm to grasp and pick up an object, a human operator may have to maneuver a joystick or even punch codes into a keyboard.
In contrast, robotic-assisted surgery allows human doctors to be more human, i.e. use more natural motions to execute tasks. Most robotic-assisted surgery has been focused on laparoscopy, which reduces the size of an incision by inserting a thin, lighted tube into the patient’s body. Naftalovich describes a typical traditional laparoscopic tool as resembling “a pair scissors tied on the end of a stick.” Since the tool rests on a fulcrum, the doctor has to adjust his movements accordingly. When he moves his hands up, the effector arm moves down. When he moves his hand to the right, the tool goes to the left, and so on. Robotic-assisted surgery eliminates this inverted motion and allows the doctor to move in a normal, more intuitive way.
Robotic-assisted surgery can enhance motion as well. It can eliminate the tremor of a doctor’s hand (a real problem in lengthy surgeries). In addition, it can scale the doctor’s movement to a size that is appropriate. It evens allows the surgeon the surgeon to rotate the effector arm with his wrist motion, something traditional tools will not do. What robotic-assisted surgical tools cannot do is operate autonomously.
Build-Your-Own-Module (BYOM)
Tablet Modules
SINGLE FINGERPRINT SCANNER
DUAL FINGERPRINT SCANNER
DUAL FINGERPRINT SCANNER
SMART CARD READER
MAGNETIC STRIPE READER
2D BARCODE READER
Compatible models: BioSense & BIOPTIX Tablets
Build-Your-Own-Module (BYOM)
Smartphone Modules
DUAL FAP45 FINGERPRINT MODULE
SINGLE FAP45 FINGERPRINT MODULE
Compatible models: BioFlex® Smartphones
I suggested that autonomous surgical capabilities may be added piecemeal, as they are with automobiles. Some new cars have autonomous capabilities, such as anti-collision features and parking. Similarly, a relatively simple autonomous capability, such as suturing, could be added to robotic-assisted surgical tools. Even though simple procedures, such as robotic suturing, are being attempted in laboratory settings, Naftalovich believes there is a long way to go until they are integrated into a surgical workflow.
“I think about autonomy all the time,” says Naftalovich. “But we are just not there yet.” Currently, robotic-assisted surgical tools only enhance the surgeon’s capabilities; they do not replace him.
Currently, robotic-assisted surgeries are primarily laparoscopic abdominal operations. Naftalovich is working on control systems that would allow robotic tools to be used in neurosurgeries. The primary challenge is integrating microscopic capabilities.







